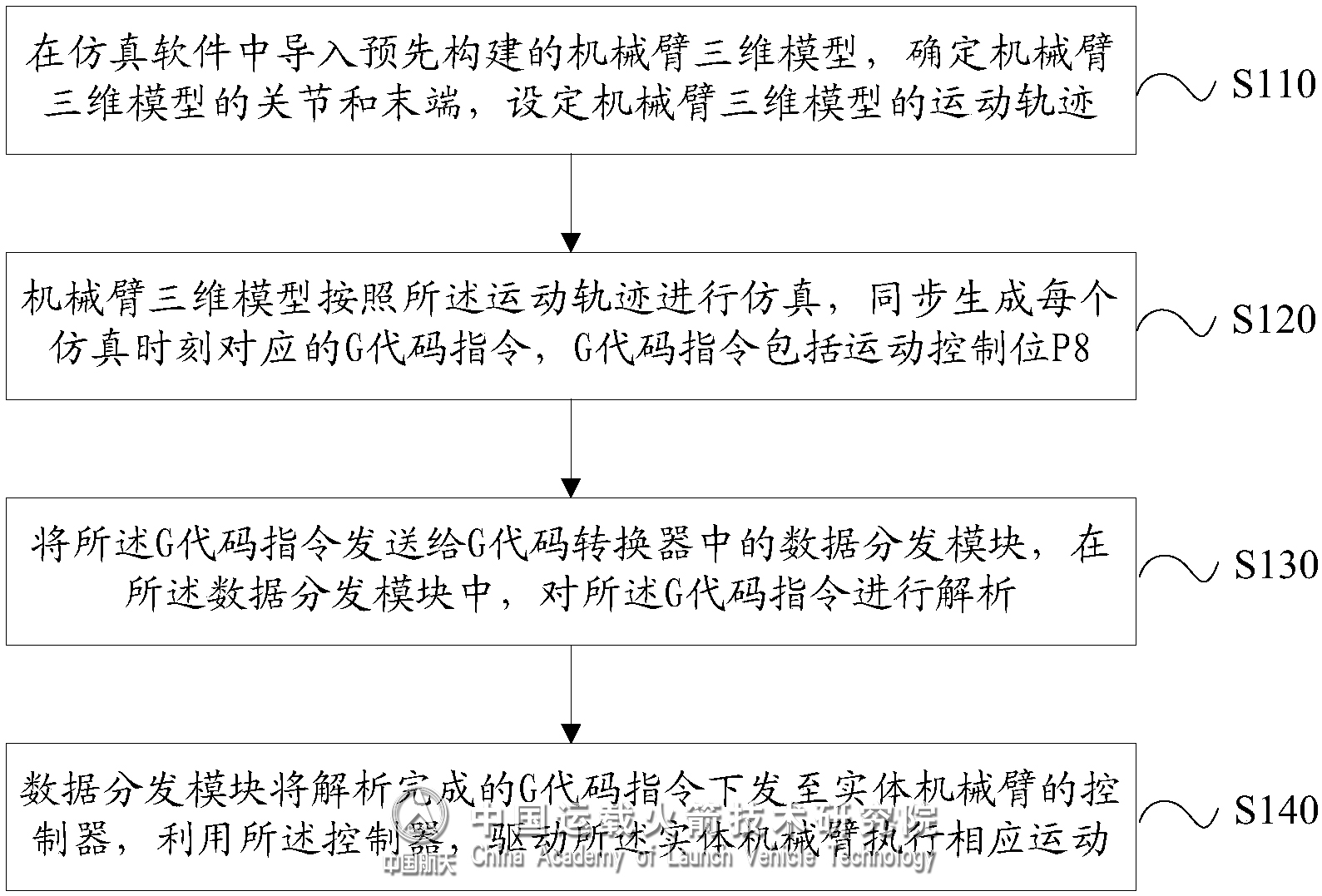
中国运载火箭技术研究院所属北京精密机电控制设备研究所自主研发的“一种基于仿真数据的机械臂运动控制方法”获国家发明专利。 在机器人编程控制领域,通过对机器人控制器直接进行编程可实现机器人的特定动作。传统工业机器人控制主要是通过离线编程的方式实现,这需要对机器人的控制文件多次转换、反复传递,耗费大量时间,降低了机器人的工作效率。 该发明提出的一种基于仿真数据的机械臂运动控制方法,可在线实时控制机械臂运动,提高工作效率。
△一种基于仿真数据的机械臂运动控制方法的流程图










网友评论
文明上网理性发言,请遵守新闻评论服务协议