“一种刚柔混合的多自由度三指软体机械手”获国家发明专利
发布时间 : 2019-09-16
来源 : 中国运载火箭技术研究院新闻中心
中国运载火箭技术研究院北京精密机电控制设备研究所申请的“一种刚柔混合的多自由度三指软体机械手”获国家发明专利。
机械手作为机器人与目标实物相互作用的执行部件,对于机器人智能化水平和作业水平的提高具有重要意义。传统的机械手结构简单、运动形式单一、自由度少、抓取稳定性差、灵活性不足,很大程度上制约了机器人技术的进一步发展。
本发明克服现有技术的不足,提出一种刚柔混合的多自由度三指软体机械手,解决了软体机械手对不同大小和不同形状目标的抓取问题。
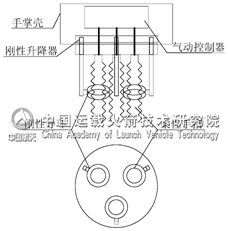
△本发明软体机械手原理图


网友评论
文明上网理性发言,请遵守新闻评论服务协议