“基于惯性传感器信息融合的人体步态采集分析系统及方法”获国家发明专利
发布时间 : 2019-09-16
来源 : 中国运载火箭技术研究院新闻中心
中国运载火箭技术研究院北京精密机电控制设备研究所自主研发的“基于惯性传感器信息融合的人体步态采集分析系统及方法”获国家发明专利。
为实现下肢外骨骼机器人良好的步态跟踪与控制,并提高其动态稳定性,需对穿戴者的步态数据进行步态信息采集和步态数据的分类、跟踪与预测。目前常用方法有图像序列解析、肌电信号检测等,但都存在明显弊端,如数据处理量大、信号易受干扰等 。
该发明克服现有技术的不足,可实现人体步态规律的实时非接触测量,并通过传感器不同输出数据的信息融合处理,建立人体步态规律的准确的数学模型,并融合支持向量机、神经网络模型等算法,实现人体步态规律的分类、跟踪与预测。
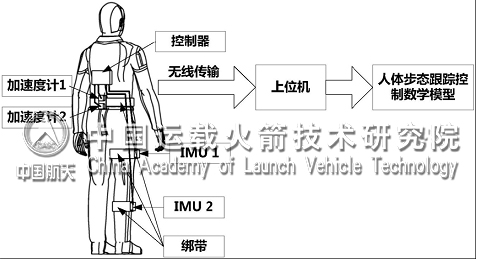
△系统示意图


网友评论
文明上网理性发言,请遵守新闻评论服务协议